

В технике и в окружающем нас мире часто приходится сталкиваться с периодическими (или почти периодическими) процессами, которые повторяются через одинаковые промежутки времени. Такие процессы называют колебательными. Колебательные явления различной физической природы подчиняются общим закономерностям. Например, колебания тока в электрической цепи и колебания математического маятника могут описываться одинаковыми уравнениями. Общность колебательных закономерностей позволяет рассматривать колебательные процессы различной природы с единой точки зрения.
Механическими колебаниями называются периодические (или почти периодические) изменения физической величины, описывающей механическое движение (скорость, перемещение, кинетическая и потенциальныая энергия и т. п.).
Если в какой-либо точке среды, в которой близко расположенные атомы или молекулы испытывают силовое воздействие, возбужден процесс механических колебаний, то этот процесс будет с конечной скоростью, зависящей от свойств среды, распространяться от точки к точке. Так возникают механические волны. Примерами такого процесса являются звуковые волны в воздухе.
Как и колебания, волновые процессы различной физической природы (звук, электромагнитные волны, волны на поверхности жидкости и т. д.) имеют много общего. Распространение волн различной физической природы можно описывать с помощью одинаковых математических уравнений. В этом проявляется единство материального мира.
|
|
Наряду с поступательными и вращательными движениями тел в механике значительный интерес представляют и колебательные движения. Механическими колебаниями называют движения тел, повторяющиеся точно (или приблизительно) через одинаковые промежутки времени. Закон движения тела, совершающего колебания, задается с помощью некоторой периодической функции времени
Примерами простых колебательных систем могут служить груз на пружине или математический маятник (рис. 2.1.1).
|
| Рисунок 2.1.1. Механические колебательные системы |
Механические колебания, как и колебательные процессы любой другой физической природы, могут быть свободными и вынужденными. Свободные колебания совершаются под действием внутренних сил системы, после того, как система была выведена из состояния равновесия. Колебания груза на пружине или колебания маятника являются свободными колебаниями. Колебания, происходящие под действием внешних периодически изменяющихся сил, называются вынужденными (см. §2.5).
Простейшим видом колебательного процесса являются простые гармонические колебания, которые описываются уравнением
Здесь
 |
Частота колебаний
|
На рис. 2.1.2 изображены положения тела через одинаковые промежутки времени при гармонических колебаниях. Такую картину можно получить экспериментально при освещении колеблющегося тела короткими периодическими вспышками света (стробоскопическое освещение). Стрелки изображают векторы скорости тела в различные моменты времени.
|
| Рисунок 2.1.2. Стробоскопическое изображение гармонических колебаний. Начальная фаза |
Рис. 2.1.3 иллюстрирует изменения, которые происходят на графике гармонического процесса, если изменяются либо амплитуда колебаний
|
| Рисунок 2.1.3. Во всех трех случаях для синих кривых  рад). рад). |
При колебательном движении тела вдоль прямой линии (ось
 |
В математике процедура нахождения предела отношения  при
при  или как
или как  . Для гармонического закона движения
. Для гармонического закона движения  Вычисление производной приводит к следующему результату:
Вычисление производной приводит к следующему результату:
 |
Появление слагаемого
 |
 |
Знак минус в этом выражении означает, что ускорение
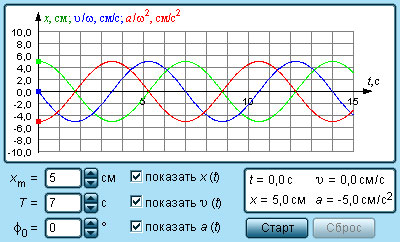
На рис. 2.1.4 приведены графики координаты, скорости и ускорения тела, совершающего гармонические колебания.
|
| Рисунок 2.1.4. Графики координаты |

 |
|
Модель.
Гармонические колебания
|
|
|
 |


